For decades, we’ve accepted a fundamental limitation in how we interact with devices: the need for external drivers. Install this. Update that. Hope it works with your operating system. Repeat.
It made sense… in the 1990s.
But in a world now defined by robotics, AI, and distributed systems, this model isn’t just outdated—it’s actively slowing innovation.
Let’s challenge the assumption.
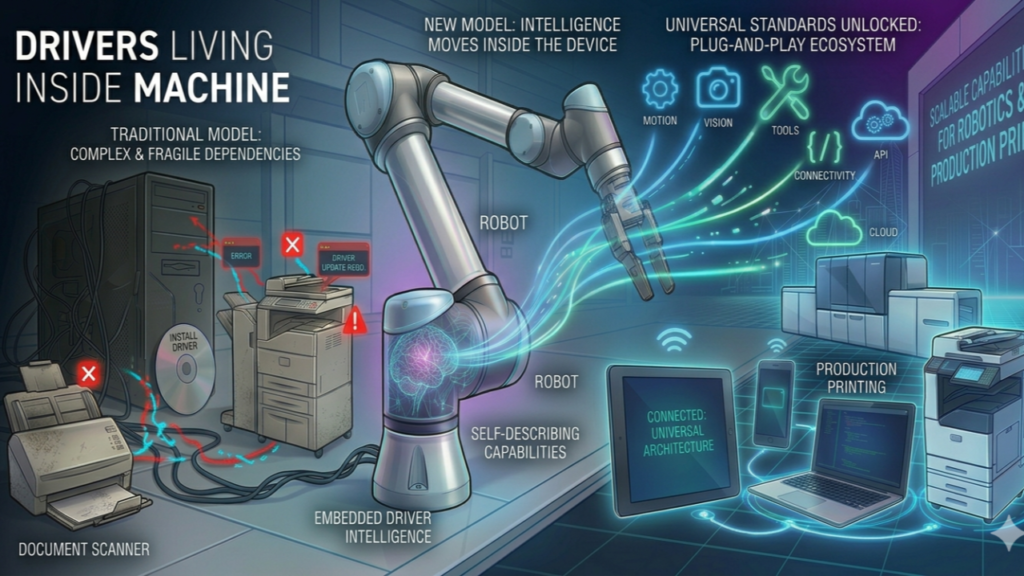
The Old Model: External Dependency
Traditional drivers live on a host computer. They translate commands between software and hardware. But this creates friction:
- OS dependencies
- Version conflicts
- Security vulnerabilities
- Endless maintenance cycles
Every new device becomes a compatibility puzzle. Every update risks breaking something that used to work.
This isn’t scalable for a future filled with autonomous robots and billions of IoT devices.
The Shift: Intelligence Moves Inside the Device
Now imagine a different model:
The “driver” doesn’t live on your computer. It lives inside the device itself.
The robot, scanner, or printer becomes self-describing, self-serving, and directly accessible over standard protocols.
No installs. No dependencies. No translation layers.
Just capability exposure.
We’re already seeing this shift happen:
- Document scanning evolved with driverless, network-native approaches
- Office print and capture workflows are moving toward platform-independent communication models
- IoT devices increasingly expose RESTful or API-based interfaces
This is not theoretical—it’s happening.
Why This Matters for Robotics
Now extend this concept to robots.
Today, robotics development is fragmented:
- Custom SDKs
- Vendor-specific APIs
- Complex integration layers
What if every robot exposed a standardized, self-contained interface?
- Discoverable over the network
- Controllable via universal APIs
- Independent of OS or local drivers
Now developers don’t “install” a robot.
They simply connect to it.
This unlocks:
- Faster integration
- Cross-platform interoperability
- Plug-and-play automation ecosystems
The Bigger Opportunity: A Universal Standard
We’ve seen what happens when industries align around a common standard:
- The web exploded with HTTP
- Mobile apps scaled with consistent APIs
- Cloud computing thrived on shared protocols
Now imagine that same consensus applied to:
- Robotics
- Workplace print
- Production print
- Monetizing Scanners Printers and Robots (IoT) with TWAIN standards
A universally accepted, device-embedded “driver” model would:
- Eliminate integration friction
- Reduce development costs
- Accelerate time-to-market
- Enable entirely new categories of applications
From Drivers to Capabilities
The real shift here isn’t technical—it’s philosophical.
We’re moving from:
👉 “Install this driver so your computer can understand the device”
to:
👉 “The device already knows how to communicate—just ask it what it can do”
That’s a fundamentally different world.
The Call to Action
The technology pieces already exist. What’s missing is industry alignment.
If robotics, workplace print, and production print stakeholders can come together around a driverless, device-native standard, we won’t just improve integration…
We’ll redefine it.
And the pace of innovation? It won’t just increase—it will compound.
The question isn’t whether this shift will happen. It’s who will lead it.